About Me
Hi, my name’s Radu and I’m a robotics software engineer. I hold a master of science in robotics from Ecole Polytechnique de Montreal. As well as working in research I also have experience working in an agile team delivering production code for robotic applications.
I am most skilled in: C++, Python and ROS
Experience
Changing the manufacturing industry with autonomous industrial robots for painting, powder coating, welding, sanding and milling.
I helped develop the overall platform and the motion planning framework for autonomous robotic arms supporting robots like the FANUC or the UR.
Skills: C++ Python Ubuntu Cmake Algorithms SOLID design Gtest Gmock pytest Git Agile (retro, daily, planning, sprint reviews) Multithreading Networking OMPL Moveit Docker Robotics simulation

Using technology to help connect people.
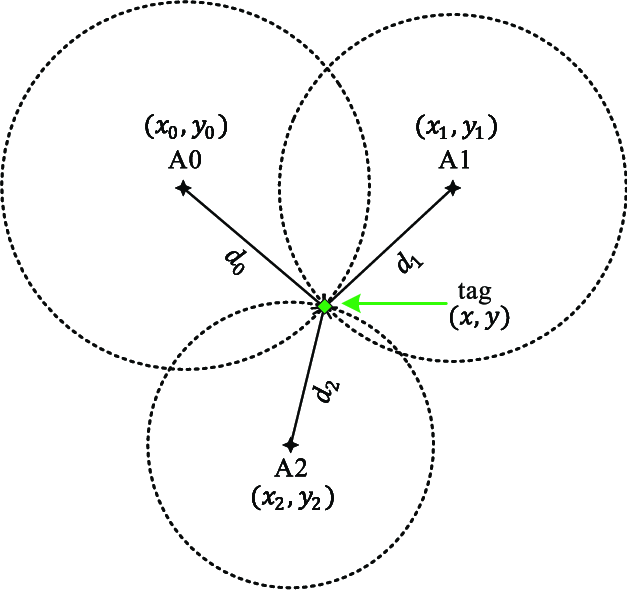
During the 2020 pandemic, I helped create a geolocation solution for indoor localization of doctors and patients in hospitals.
Skills: C++ C programming for embedded DWM1001 modules Python Ubuntu UWB Range-based localization algorithms Docker Git Gazebo Robotics simulation
Changing people's lives with robotics.
In the context of rehabilitating disabled people, my goal was to design and develop an autonomous quadrotor table tennis player. This project involved pushing the boundaries in terms of aggressive control and precise trajectory tracking for quadrotors.
I published an article about it in Mechatronics Journal.
Skills: C++ Python ROS Gazebo Ubuntu Control algorithms iLQR Robotics hardware Motion capture system CAD design Research
Software architecture:

Hitting motion in simulation and on the real quadrotor:


Other projects
This is probably one thing robots should do instead of humans!
I did this project in a team of 2 wanting to grow it in a viable product (at least the part without the blockchain technology). We also participated at the 2022 Chainlink Spring Hackathon and won multiple prizes! Check it out on devpost.
Skills: C++ Python ROS Gazebo Ubuntu Control algorithms Solidity Brownie Chainlink external adapters

Prizes:
- WINNER Chainlink Top Quality Projects [$750 each]
- WINNER Filecoin - Runners up - $12,500 [$1000 each]

Skills: ROS2 Gazebo tf2 C++ Python Ubuntu


Education
Ecole Polytechnique de Montreal
MSc Robotics
2019 - 2020
I had some courses in robotics and optimal control but most of my time was invested towards research.
I was a member of Elikos, an engineering student club in the field of aerial robotics who participates in the Unmanned Systems Canada Student annual competition.
Ecole Polytechnique de Montreal
BEng Aerospace Engineering
2014 - 2018
Mention of Excellence for outstanding academic results.
I did an engineering internship at Bombardier which is one of the biggest aircraft manufacturer.
A Little More About Me
Alongside my interests in robotics and software engineering some of my other interests and hobbies are:
-
Bodybuilding
-
Hiking
-
Traveling
-
Watching high quality cinematographic movies
Transfagarasan, Romania


Blade Runner 2022
